Automatic Garbage Collector project is about making a quiet robot that collects garbage. It uses a special card near the door to know when to come inside. When it arrives, it makes a buzzer sound and flashes a light. The robot follows a dark path using sensors, going from door to door to pick up garbage. It’s all controlled by an Arduino and a motor driver to move smoothly and quietly around homes, Automatic Garbage Collector Project for students
Components Required:
- Arduino Board: 1
- RFID Module (e.g., MFRC522): 1
- RFID Card: 1
- Motor Driver Module (e.g., L298N): 1
- DC Motors: 2
- IR Sensors: 2
- Buzzer: 1
- LED: 1
- I2C LCD Module (e.g., 16×2): 1
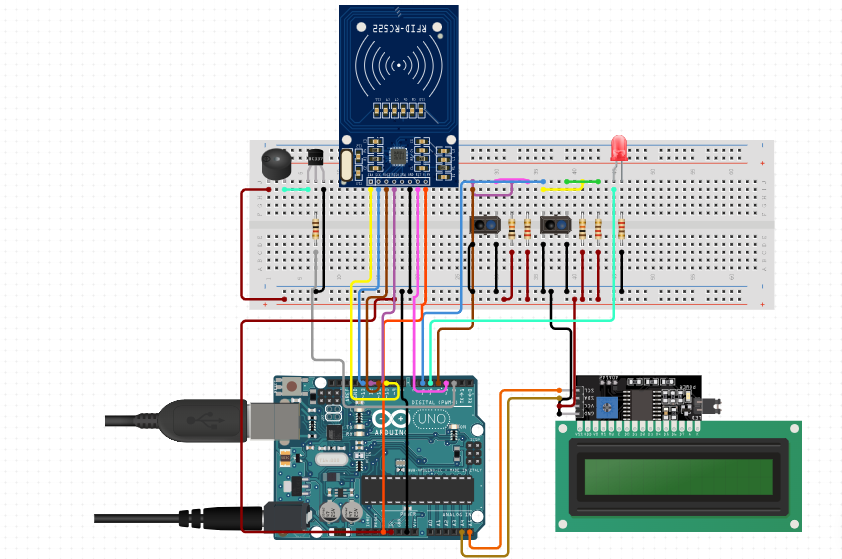
Connections:
- RFID Module (MFRC522):
- SDA: Connect to digital pin 10 (SS_PIN)
- SCK: Connect to digital pin 13 (SPI SCK)
- MOSI: Connect to digital pin 11 (SPI MOSI)
- MISO: Connect to digital pin 12 (SPI MISO)
- RST: Connect to digital pin 9 (RST_PIN)
- 3.3V: Connect to 3.3V pin on Arduino
- GND: Connect to GND pin on Arduino
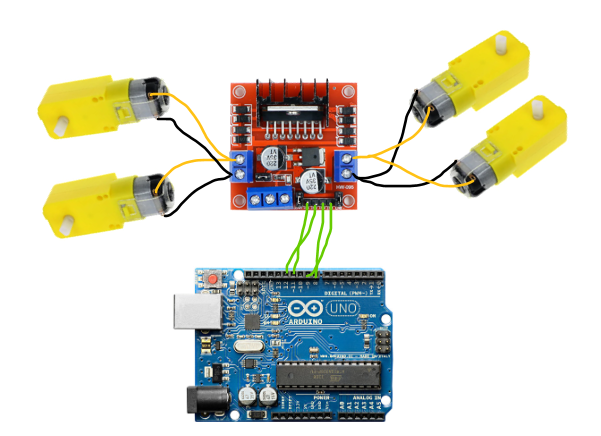
- Motor Driver Module (e.g., L298N):
- Motor 1 Control:
- Input 1 (IN1): Connect to digital pin 2 (motor1A)
- Input 2 (IN2): Connect to digital pin 3 (motor1B)
- Motor 2 Control:
- Input 3 (IN3): Connect to digital pin 4 (motor2A)
- Input 4 (IN4): Connect to digital pin 5 (motor2B)
- VCC: Connect to external power supply positive (e.g., 12V)
- GND: Connect to external power supply negative and Arduino GND
- Motor 1 Control:
- IR Sensors:
- Left IR Sensor: Connect analog output to analog pin A0 (leftIRSens)
- Right IR Sensor: Connect analog output to analog pin A1 (rightIRSens)
- VCC: Connect to 5V pin on Arduino
- GND: Connect to GND pin on Arduino
- Buzzer and LED:
- Buzzer: Connect positive pin to digital pin 6 (buzzerPin), negative to GND
- LED: Connect positive pin to digital pin 7 (ledPin), negative to GND
- I2C Communication:
- SDA: Connect to analog pin A4 (SDA)
- SCL: Connect to analog pin A5 (SCL)
- VCC: Connect to 5V pin on Arduino
- GND: Connect to GND pin on Arduino
- Mini Breadboard
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <SPI.h>
#include <MFRC522.h>
#define SS_PIN 3 // Slave Select Pin for RFID module
#define RST_PIN 10 // Reset Pin for RFID module
MFRC522 mfrc522(SS_PIN, RST_PIN); // Create instance of MFRC522
// Define pins for motor driver
const int motor1A = 11; // Motor 1 control pin A
const int motor1B = 12; // Motor 1 control pin B
const int motor2A = 8; // Motor 2 control pin A
const int motor2B = 9; // Motor 2 control pin B
// Define pins for IR sensors
const int leftIRSens = 4; // Analog pin for left IR sensor
const int rightIRSens = 6; // Analog pin for right IR sensor
// Define pins for buzzer and LED
const int buzzerPin = 2;
const int ledPin = 5;
// I2C LCD
LiquidCrystal_I2C lcd(0x27, 16, 2); // Address 0x27, 16 columns, 2 rows
void setup() {
Serial.begin(9600); // Initialize serial communication
Wire.begin(); // Init I2C bus
mfrc522.PCD_Init(); // Init RFID module
lcd.begin(); // Initialize the LCD
lcd.backlight(); // Turn on the backlight
// Set motor control pins as output
pinMode(motor1A, OUTPUT);
pinMode(motor1B, OUTPUT);
pinMode(motor2A, OUTPUT);
pinMode(motor2B, OUTPUT);
// Set IR sensor pins as input
pinMode(leftIRSens, INPUT);
pinMode(rightIRSens, INPUT);
// Set buzzer and LED pins as output
pinMode(buzzerPin, OUTPUT);
pinMode(ledPin, OUTPUT);
// Stop motors initially
stopMotors();
}
void loop() {
// Scan for RFID cards
if (mfrc522.PICC_IsNewCardPresent() && mfrc522.PICC_ReadCardSerial()) {
// Card detected, activate buzzer and LED
digitalWrite(buzzerPin, HIGH);
digitalWrite(ledPin, HIGH);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("DUMP YOUR");
lcd.setCursor(0, 1);
lcd.print("GARBAGE");
delay(1000); // Keep buzzer and LED on for 1 second
digitalWrite(buzzerPin, LOW);
digitalWrite(ledPin, LOW);
// Move forward to collect garbage
moveForward();
delay(3000); // Adjust as needed for robot movement time
// Check IR sensors for obstacles
if (analogRead(leftIRSens) > 500 || analogRead(rightIRSens) > 500) {
// Obstacle detected, stop and turn
stopMotors();
delay(1000);
if (analogRead(leftIRSens) > analogRead(rightIRSens)) {
turnLeft();
} else {
turnRight();
}
delay(1000);
} else {
// No obstacle, continue moving forward
moveForward();
}
} else {
// No card detected, stop motors
stopMotors();
lcd.clear(); // Clear LCD display
}
delay(100); // Adjust delay for loop stability
}
// Function to move robot forward
void moveForward() {
digitalWrite(motor1A, HIGH);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, HIGH);
digitalWrite(motor2B, LOW);
}
// Function to turn robot right
void turnRight() {
digitalWrite(motor1A, HIGH);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, HIGH);
}
// Function to turn robot left
void turnLeft() {
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, HIGH);
digitalWrite(motor2A, HIGH);
digitalWrite(motor2B, LOW);
}
// Function to stop robot
void stopMotors() {
digitalWrite(motor1A, LOW);
digitalWrite(motor1B, LOW);
digitalWrite(motor2A, LOW);
digitalWrite(motor2B, LOW);
}