The VYST-C-ROBO project pioneers modern technology, integrating components like the L298N motor driver, dual ultrasonic sensors, Arduino microcontrollers, a DC motor, and a robust large motor. These elements synergize to create a sewage-cleaning robot, ensuring safe navigation by promptly halting upon detecting obstacles. This initiative not only fosters understanding among students about sensor and motor integration but also emphasizes the critical role of technology in addressing real-world challenges like sewage cleaning, thereby promoting a cleaner and safer environment. Additionally, the VYST-C-ROBO project aims to revolutionize the sanitation industry by showcasing how robotics and intelligent systems can effectively tackle complex tasks such as sewage cleaning. By leveraging cutting-edge technology, this initiative sets a benchmark for sustainable and efficient solutions in environmental management, driving toward a greener and healthier future.
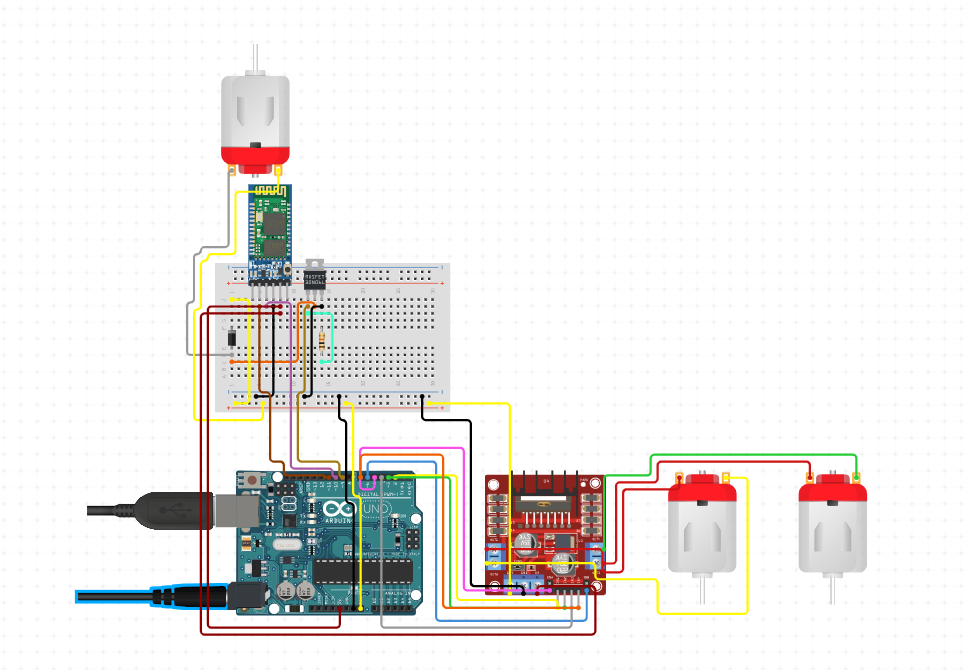
Components/Circuit:
- L298N Motor Driver: Controls DC motor speed and direction.
- Ultrasonic Sensors: Detect obstacles for safe navigation.
- Arduino Microcontroller: Processes sensor data and controls the system.
- DC Motor: Propels the car and aids in mobility.
- Big Motor: Provides additional power for movement and operation.
- Bluetooth Module: Enables wireless communication for remote control and data exchange.
CODE
#include <SoftwareSerial.h>
// Bluetooth module pins
SoftwareSerial Bluetooth(10, 11); // RX, TX
// Motor driver pins
const int motorA1 = 2;
const int motorA2 = 3;
const int motorB1 = 4;
const int motorB2 = 7;
const int enableA = 5;
const int enableB = 6;
void setup() {
// Initialize serial communication for debugging
Serial.begin(9600);
// Initialize Bluetooth communication
Bluetooth.begin(9600);
// Set motor driver pins as outputs
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
pinMode(enableA, OUTPUT);
pinMode(enableB, OUTPUT);
// Set initial motor speed
analogWrite(enableA, 255);
analogWrite(enableB, 255);
}
void loop() {
// Check if data is available from Bluetooth
if (Bluetooth.available()) {
char command = Bluetooth.read();
// Control the robot based on received command
switch (command) {
case 'F': // Move forward
moveForward();
break;
case 'B': // Move backward
moveBackward();
break;
case 'L': // Turn left
turnLeft();
break;
case 'R': // Turn right
turnRight();
break;
case 'S': // Stop
stopMotors();
break;
default:
break;
}
}
}
void moveForward() {
digitalWrite(motorA1, HIGH);
digitalWrite(motorA2, LOW);
digitalWrite(motorB1, HIGH);
digitalWrite(motorB2, LOW);
Serial.println("Moving Forward");
}
void moveBackward() {
digitalWrite(motorA1, LOW);
digitalWrite(motorA2, HIGH);
digitalWrite(motorB1, LOW);
digitalWrite(motorB2, HIGH);
Serial.println("Moving Backward");
}
void turnLeft() {
digitalWrite(motorA1, LOW);
digitalWrite(motorA2, HIGH);
digitalWrite(motorB1, HIGH);
digitalWrite(motorB2, LOW);
Serial.println("Turning Left");
}
void turnRight() {
digitalWrite(motorA1, HIGH);
digitalWrite(motorA2, LOW);
digitalWrite(motorB1, LOW);
digitalWrite(motorB2, HIGH);
Serial.println("Turning Right");
}
void stopMotors() {
digitalWrite(motorA1, LOW);
digitalWrite(motorA2, LOW);
digitalWrite(motorB1, LOW);
digitalWrite(motorB2, LOW);
Serial.println("Stopping Motors");
}
How it Works:
- Obstacle Detection: Ultrasonic sensors detect obstacles in the car’s path.
- Motor Control: The L298N motor driver halts the car upon obstacle detection and controls both the DC motor and the big motor for propulsion.
- Safety Assurance: Ensures safe navigation and independence for disabled individuals.
Benefits:
- Enhanced Safety: Halts the car upon detecting obstacles, preventing accidents.
- Accessibility: Provides an accessible solution for disabled individuals to navigate safely.
- Independent Mobility: Enables safe and independent mobility for handicapped individuals.
- Sensor-Motor Integration: Demonstrates the integration of sensors and motor control for intelligent vehicle systems.
Application:
The VYST-C-ROBO is ideal for providing safe and accessible mobility solutions for disabled individuals. It showcases the potential of sensor technology and motor control integration in creating intelligent, obstacle-aware vehicles tailored for specific needs in transportation and accessibility.











