This project showcases a pick and place robot that you can control via your smartphone wirelessly. It combines robotics and programming. It has features as following:
1. Wheel with track belt
2. Pick and place operation by gripping
3. Arduino Programming
4. Bluetooth application-based Android smartphone control
5. Easy circuit implementation
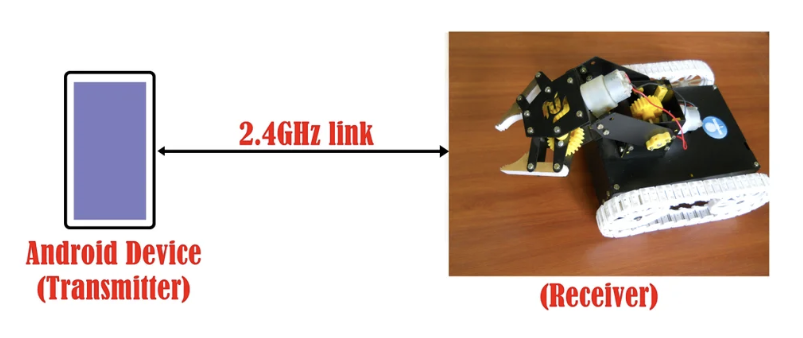
There are two parts in the robot, the bottom driving part and the gripping part. The bottom driving part enables the robot to move forward, backward, left and right while the gripping part enables it to pick and place any object. The robot is strong enough to handle tasks like transporting.
The robot is connected to the smartphone through Bluetooth and can be controlled by using an android app which has multiple buttons for different commands.
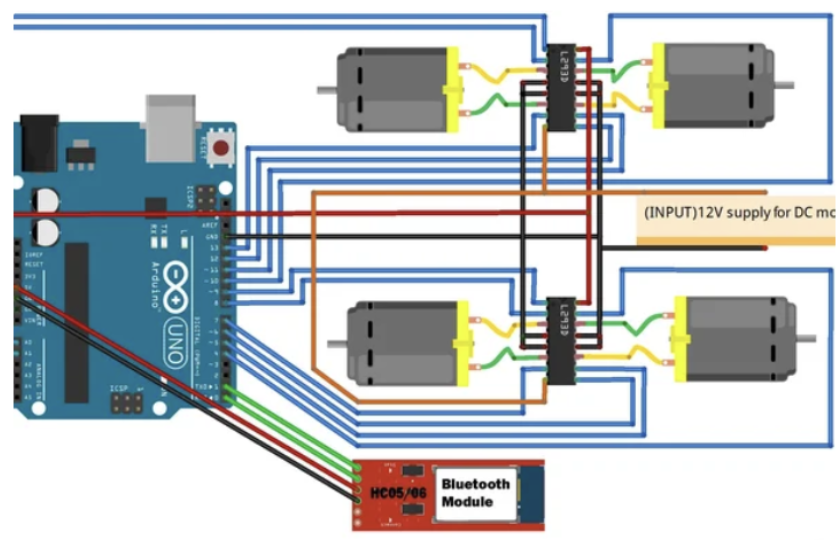
The Arduino Uno (microcontroller) is the brain of the project as it receives command from the Bluetooth module and provides the signal to the motor driver and motor driver takes signal from the Arduino pins and drives the motor by using 12V battery. The circuit diagram is given below:
To enable the robot, give power to it by using 12V battery. For the first time, you have to download an android app to control the robot. Now turn on the Bluetooth of your smartphone and connect the Bluetooth module to the mobile phone by pairing them up. Finally open the application and connect it with the robot. You can find the code below:
int motor1Pin1 = 8; // pin 2 on L293D IC
int motor1Pin2 = 7; // pin 7 on L293D IC
int enable1Pin = 9; // pin 1 on L293D IC
int motor2Pin1 = 5; // pin 10 on L293D IC
int motor2Pin2 = 4; // pin 15 on L293D IC
int enable2Pin = 6; // pin 9 on L293D IC
int motor3Pin1 = 14; // pin 2 on L293D IC
int motor3Pin2 = 13; // pin 7 on L293D IC
int enable3Pin = 15; // pin 1 on L293D IC
int motor4Pin1 = 11; // pin 10 on L293D IC
int motor4Pin2 = 10; // pin 15 on L293D IC
int enable4Pin = 12; // pin 9 on L293D IC
int state;
int flag=0; //makes sure that the serial only prints once the state
void setup() {
pinMode(motor1Pin1, OUTPUT),pinMode(motor1Pin2, OUTPUT),pinMode(enable1Pin, OUTPUT);
pinMode(motor2Pin1, OUTPUT),pinMode(motor2Pin2, OUTPUT),pinMode(enable2Pin, OUTPUT);
pinMode(motor3Pin1, OUTPUT),pinMode(motor3Pin2, OUTPUT),pinMode(enable3Pin, OUTPUT);
pinMode(motor4Pin1, OUTPUT),pinMode(motor4Pin2, OUTPUT),pinMode(enable4Pin, OUTPUT);
Stop();
Serial.begin(9600);
}
void loop() {
if(Serial.available() > 0){
state = Serial.read();
flag=0;
}
if (state == 'F'){
Forward();
if(flag == 0)Serial.println("Go Forward"),flag=1;
}
else if (state == 'B'){
Reverse();
if(flag == 0)Serial.println("Go Reverse"),flag=1;
}
else if (state == 'L'){
Left();
if(flag == 0)Serial.println("Go Left"),flag=1;
}
else if (state == 'R'){
Right();
if(flag == 0)Serial.println("Go Right"),flag=1;
}
else if (state == 'S'){
Stop();
if(flag == 0)Serial.println("STOP!"),flag=1;
}
else if (state == 'P'){
Pick();
if(flag == 0)Serial.println("Pick"),flag=1;
}
else if (state == 'Q'){
Place();
if(flag == 0)Serial.println("Place"),flag=1;
}
else if (state == 'H'){
Hold();
if(flag == 0)Serial.println("Hold"),flag=1;
}
else if (state == 'I'){
Free();
if(flag == 0)Serial.println("Unhold"),flag=1;
}
}
void Forward(){
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
digitalWrite(enable1Pin, HIGH);
digitalWrite(enable2Pin, HIGH);
}
void Reverse(){
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
digitalWrite(enable1Pin, HIGH);
digitalWrite(enable2Pin, HIGH);
}
void Left(){
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
digitalWrite(enable1Pin, HIGH);
digitalWrite(enable2Pin, HIGH);
}
void Right(){
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
digitalWrite(enable1Pin, HIGH);
digitalWrite(enable2Pin, HIGH);
}
void Pick(){
digitalWrite(motor3Pin1, LOW);
digitalWrite(motor3Pin2, HIGH);
digitalWrite(enable3Pin, HIGH);
}
void Place(){
digitalWrite(motor3Pin1, HIGH);
digitalWrite(motor3Pin2, LOW);
digitalWrite(enable3Pin, HIGH);
}
void Hold(){
digitalWrite(motor4Pin1, LOW);
digitalWrite(motor4Pin2, HIGH);
digitalWrite(enable4Pin, HIGH);
}
void Free(){
digitalWrite(motor4Pin1, HIGH);
digitalWrite(motor4Pin2, LOW);
digitalWrite(enable4Pin, HIGH);
}
void Stop(){ // Stop the motors
digitalWrite(enable1Pin, LOW);
digitalWrite(enable2Pin, LOW);
digitalWrite(enable3Pin, LOW);
digitalWrite(enable4Pin, LOW);
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, LOW);
digitalWrite(motor3Pin1, LOW);
digitalWrite(motor3Pin2, LOW);
digitalWrite(motor4Pin1, LOW);
digitalWrite(motor4Pin2, LOW);
}