A gesture-controlled wheelchair utilizing Arduino Uno, BO (Brushless DC) motor, ADXL (accelerometer), and a motor driver offers an innovative and user-friendly solution for individuals with mobility impairments. Here’s a detailed description of such a system:
Components:
1. Arduino Uno: The central control unit responsible for receiving input from sensors, processing data, and controlling the movement of the wheelchair via the motor driver.
2. BO (Battery operated) Motor: This motor serves as the driving force for the wheelchair, providing propulsion and steering capabilities. It’s controlled by the Arduino Uno through a motor driver.
3. ADXL (Accelerometer): The accelerometer detects the user’s gestures and movements. It measures acceleration along three axes, allowing the Arduino Uno to interpret gestures such as tilting or shaking of the accelerometer module.
4. Motor Driver: The motor driver acts as an interface between the Arduino Uno and the BO motor, regulating the motor’s speed and direction based on commands received from the Arduino Uno.
Operation:
5. Gesture Recognition: The ADXL continuously monitors the user’s gestures and movements. When the user tilts or shakes the accelerometer module in a particular direction, the accelerometer sends corresponding signals to the Arduino Uno.
6. Control Algorithm: The Arduino Uno processes the signals received from the accelerometer and interprets them as commands for controlling the wheelchair’s movement. For example, tilting the accelerometer forward might signal the wheelchair to move forward, while tilting it to the left or right could indicate a turn in that direction.
7. Motor Control: Based on the interpreted gestures, the Arduino Uno sends appropriate commands to the motor driver to control the speed and direction of the BO motor. For instance, if the user tilts the accelerometer forward, the Arduino Uno commands the motor driver to move the wheelchair forward at a predetermined speed.
8. Safety Features: The system can incorporate safety features such as obstacle detection and collision avoidance to ensure the user’s safety during operation. Sensors like ultrasonic or infrared sensors can be used to detect obstacles in the wheelchair’s path and automatically stop or maneuver
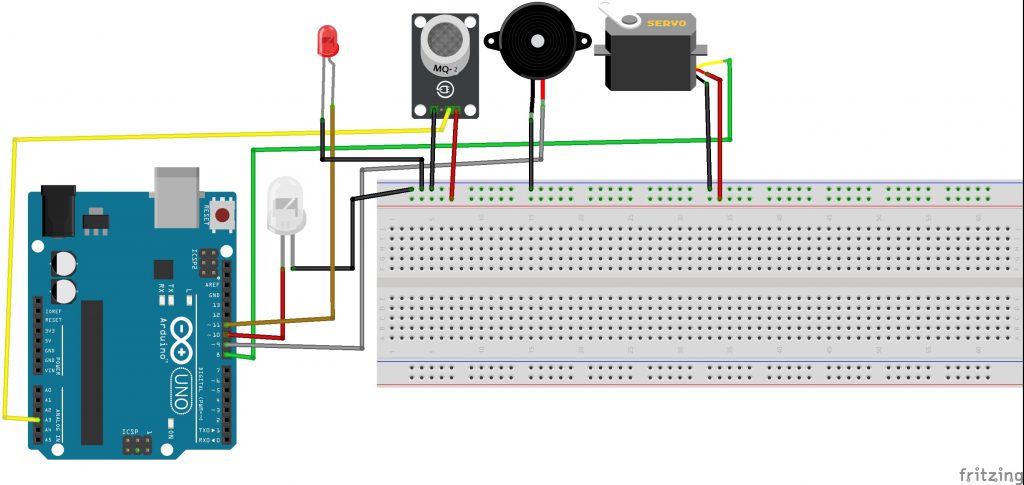
CIRCUIT DIAGRAM
CODE
#include <Servo.h>
int servoPin = 8;
int smoke= A3;
int led=11;
int led1=10;
int buzz=9;
int smokeSensor;
Servo Servo1;
void setup() {
// put your setup code here, to run once:
pinMode(smoke, INPUT);
pinMode(led1,OUTPUT);
pinMode(buzz,OUTPUT);
pinMode(led,OUTPUT);
Servo1.attach(servoPin);
}
void loop() {
// put your main code here, to run repeatedly:
if (smokeSensor>130)
{
digitalWrite(buzz,HIGH);
digitalWrite(led1,LOW);
digitalWrite(led,HIGH);
Servo1.write(90);
}
if (smokeSensor<130)
{
digitalWrite(led1,HIGH);
digitalWrite(buzz,LOW);
Servo1.write(-90);
digitalWrite(led,LOW);
}
}










