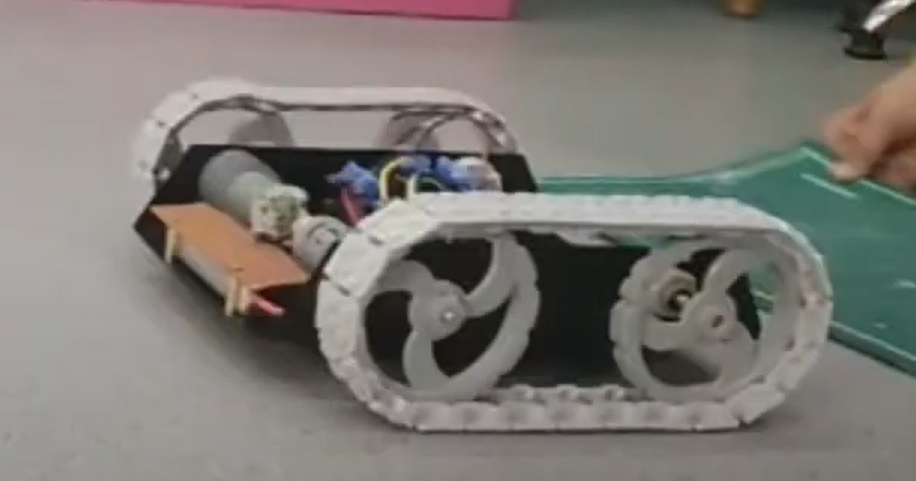
This project embodies innovation and creativity by utilizing track belts, an Arduino Uno microcontroller, and a motor driver shield to create a versatile robotic car. Designed to traverse challenging surfaces, this project engages students in practical robotics while promoting problem-solving and robotics skills.

Upon powering on, it initiates movement forward regardless of the surface condition, thanks to its track belts. The track belts provide enhanced traction, allowing the bot to navigate smoothly over rough terrain such as uneven surfaces that normal wheeled bots might struggle with. This capability not only demonstrates the bot’s resilience but also teaches students about the importance of adaptability in robotics.

The Arduino Uno microcontroller, coupled with the motor driver shield, controls the bot’s two DC motors. The motors are configured to rotate the track belts continuously in the forward direction, ensuring consistent movement. Importantly, even if the bot is accidentally flipped upside down, the track belts enable it to continue operating, showcasing the project’s robust design and reliability.
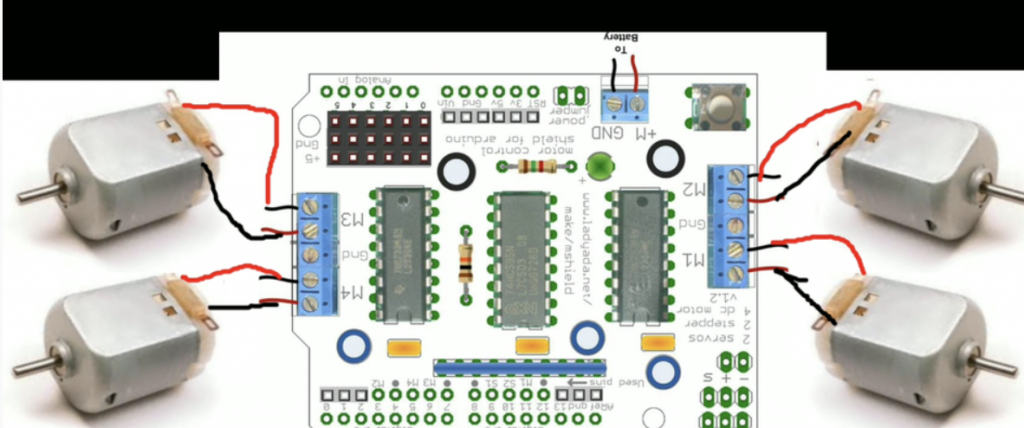
The circuit diagram and code is given below:
// Define motor driver pins
const int motorA1 = 8; // Motor A control pin 1
const int motorA2 = 9; // Motor A control pin 2
const int motorB1 = 10; // Motor B control pin 1
const int motorB2 = 11; // Motor B control pin 2
void setup() {
// Set motor driver pins as output
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
// Initialize motors to move forward
digitalWrite(motorA1, HIGH);
digitalWrite(motorA2, LOW);
digitalWrite(motorB1, HIGH);
digitalWrite(motorB2, LOW);
}
void loop() {
// Keep the motors running forward continuously
digitalWrite(motorA1, HIGH);
digitalWrite(motorA2, LOW);
digitalWrite(motorB1, HIGH);
digitalWrite(motorB2, LOW);
}
Application:
Outdoor Exploration and Surveillance:
- Rugged Terrain Navigation: Capable of traversing uneven surfaces, gravel, grass, and other challenging terrains, making it ideal for outdoor exploration and surveillance missions.
- Uninterrupted Operation: Continues to function even if flipped upside down, ensuring continuous monitoring and operation in unpredictable environments.
Search and Rescue Operations:
- Accessibility: Can reach areas inaccessible to traditional wheeled robots, such as rubble or debris fields after disasters, aiding in search and rescue efforts.
- Reliability: Maintains movement and functionality across varied surfaces and orientations, ensuring reliable operation during critical missions.
Agricultural and Industrial Automation:
- Field Work: Used in agriculture for tasks like soil sampling, crop monitoring, and spraying, thanks to its ability to operate on rough terrain.
- Warehouse Operations: Assists in logistics and material handling in industrial settings where floors may be uneven or cluttered.
Educational Tool for Robotics:
- STEM Education: Provides a practical demonstration of engineering principles in robotics, teaching students about motor control, traction, and adaptation to different surfaces.
- Innovation and Design: Encourages creativity in designing and improving robotic systems for specific applications, fostering problem-solving skills among learners.
Remote Sensing and Environmental Monitoring:
- Data Collection: Equipped with sensors, can gather environmental data from remote or challenging locations, contributing to ecological research and monitoring efforts.
- Adaptability: Performs reliably in outdoor environments, enhancing data collection capabilities in remote or hazardous areas.