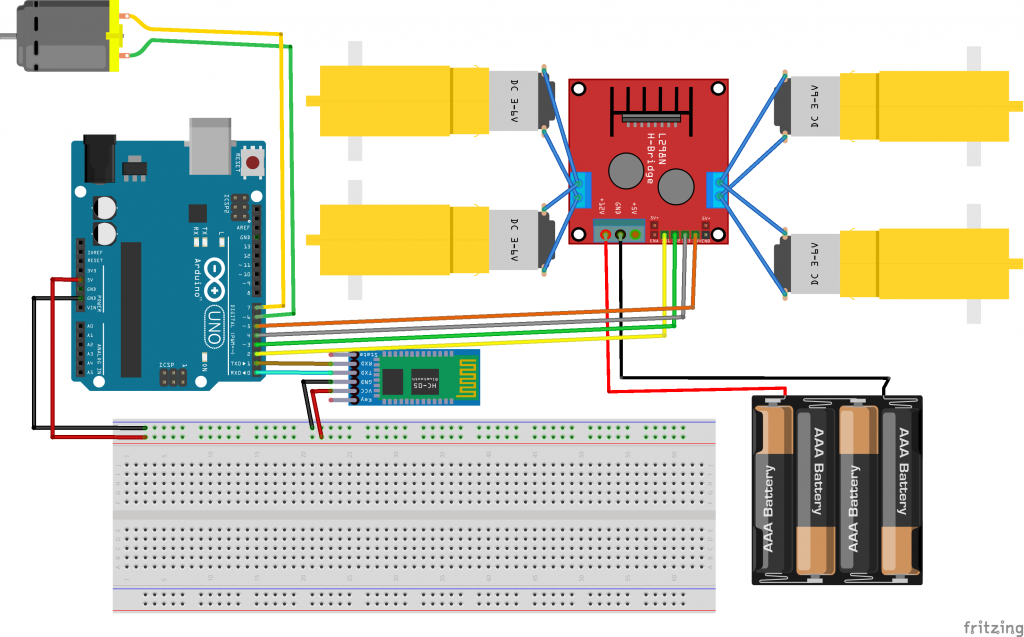
| The Stubble-Removing Robot is an innovative prototype that combines grooming technology with robotics, built on an Arduino Bluetooth car platform. This autonomous device is designed to effectively remove stubble from various surfaces, providing an efficient and convenient grooming solution. Its foundation lies in the precise coordination of motor movements, enabling it to adapt to different surface textures for optimal performance. Components: Arduino Uno: The primary microcontroller responsible for managing the motor operations and overall functioning of the robot. HC-05 Bluetooth Module: Enables wireless control and communication between the robot and a smartphone or tablet, allowing for remote monitoring and adjustments. Bo-motors: Small DC motors used to drive the robot’s wheels, providing the necessary mobility for surface navigation. Motor Driver Shield: Regulates the power to the Bo-motors, ensuring smooth and controlled movements. Cutting Mechanism: (Optional) A specialized attachment could be added to the robot for stubble removal. Working: The Arduino Uno processes commands received via the HC-05 Bluetooth module from a paired device, such as a smartphone. Through a dedicated app, users can control the robot’s movements or set it to autonomous mode. The Motor Driver Shield powers the Bo-motors, enabling the robot to move forward, reverse, or turn as needed. The stubble-removing attachment moves over surfaces, cutting stubble efficiently as the robot navigates autonomously. This robot represents a practical, hands-free solution for personal grooming, combining automation and remote control for user-friendly stubble removal. |
#include "SoftwareSerial.h"
SoftwareSerial HC05(0,2);
// /RX,TX/
int m1=4;
int m2=5;
int m3=7;
int m4=8;
int BluetoothData;
void setup()
{
Serial.begin(9600);
pinMode( m1 ,OUTPUT);
pinMode( m2 ,OUTPUT);
pinMode( m3 ,OUTPUT);
pinMode( m4 ,OUTPUT);
HC05.begin(9600);
}
void loop() {
if (HC05.available())
{
BluetoothData=HC05.read();
Serial.println( BluetoothData);
if(BluetoothData == 51){ //move forward(all motors rotate in forward direction)
digitalWrite(m1,HIGH);
digitalWrite(m2,LOW);
digitalWrite(m3,LOW);
digitalWrite(m4,HIGH);
}
else if(BluetoothData == 52){ //move reverse (all motors rotate in reverse direction)
digitalWrite(m1,LOW);
digitalWrite(m2,HIGH);
digitalWrite(m3,HIGH);
digitalWrite(m4,LOW);
}
else if(BluetoothData == 49){ //turn right (left side motors rotate in forward direction, right side motors doesn't rotate)
digitalWrite(m1,LOW);
digitalWrite(m2,LOW);
digitalWrite(m3,HIGH);
digitalWrite(m4,LOW);
}
else if(BluetoothData == 50){ //turn left (right side motors rotate in forward direction, left side motors doesn't rotate)
digitalWrite(m1,HIGH);
digitalWrite(m2,LOW);
digitalWrite(m3,LOW);
digitalWrite(m4,LOW);
}
else if(BluetoothData == 111){ //STOP (all motors stop)
digitalWrite(m1,LOW);
digitalWrite(m2,LOW);
digitalWrite(m3,LOW);
digitalWrite(m4,LOW);
}
delay(100);
}
}











